Kalman Filter
An adaptive 1D Kalman filter for smoothing price data with minimal lag.
Visual Example
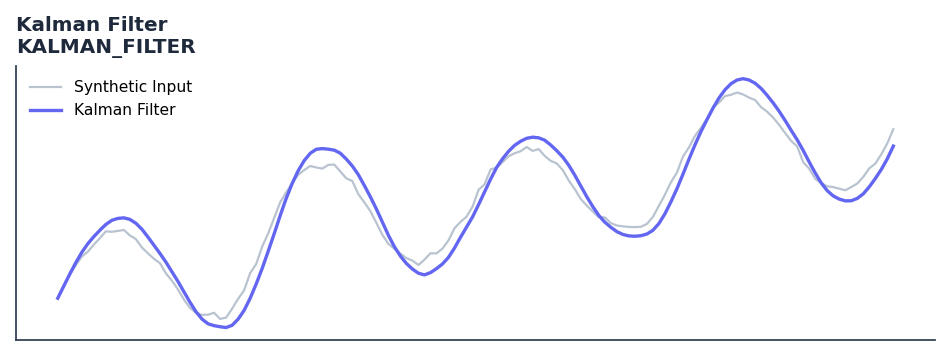
Synthetic ideal per library logic. Generated 2026-06-25 IST via docs/generate_all_previews.py (reproducible; maps to core Next<T> implementation).
Description
The Kalman Filter indicator is a technical analysis tool that an adaptive 1d kalman filter for smoothing price data with minimal lag.
This indicator is primarily used for identifying key market conditions. It provides a robust signal that can be easily integrated into both simple strategies and more complex machine learning feature pipelines. Compared to its alternatives, it offers a distinct balance of responsiveness and stability.
Traders often combine this with other metrics to confirm signals and avoid false positives during sideways market regimes. It remains a standard tool for systematic trading models.
Use as a highly responsive alternative to moving averages. The Q parameter (process noise) controls responsiveness to trend changes, while R (measurement noise) controls smoothness. Higher Q makes it track price faster; higher R increases smoothing.
The Kalman Filter is an optimal estimator for linear systems with Gaussian noise. In technical analysis, the 1D version recursively updates the estimate of the 'true' price by balancing the predicted state against new measurements. It is particularly effective for feature engineering in ML models due to its ability to separate signal from noise dynamically.
QuantWave implements this indicator via the universal Next<T> trait, guaranteeing bit-identical results between Rust streaming, Python streaming, and Polars batch (.ta() / map_batches) surfaces.
Formula / Specification
Implementation (quantwave-core/src/indicators/kalman.rs):
[ P_{t|t-1} = P_{t-1} + Q ] [ K_t = \frac{P_{t|t-1}}{P_{t|t-1} + R} ] [ X_t = X_{t-1} + K_t(Z_t - X_{t-1}) ] [ P_t = (1 - K_t)P_{t|t-1} ]
Gold-standard parity vectors: quantwave-core/tests/gold_standard/kalman_filter.json.
Parameters
| Parameter | Default | Description |
|---|---|---|
q |
0.01 | Process noise (responsiveness) |
r |
0.1 | Measurement noise (smoothing) |
Usage Examples
Streaming (Rust)
use quantwave_core::indicators::KALMAN_FILTER;
use quantwave_core::traits::Next;
let mut ind = KALMAN_FILTER::new(0.01);
for price in &prices {
let value = ind.next(price);
}
Streaming (Python)
from quantwave import KALMAN_FILTER
ind = KALMAN_FILTER(0.01)
for price in prices:
value = ind.next(price)
Polars Batch (Python)
import polars as pl
import quantwave as qw
def apply_kalman_filter(series: pl.Series) -> pl.Series:
ind = qw.KALMAN_FILTER(0.01)
return pl.Series([ind.next(float(v)) for v in series.to_list()])
df = (
pl.read_csv('ohlcv.csv')
.lazy()
.with_columns(
pl.col("close").map_batches(apply_kalman_filter, return_dtype=pl.Float64).alias("kalman_filter")
)
.collect()
)
All surfaces are bit-identical via the single Next<T> implementation and proptests.
Edge Cases & Limitations
- Warm-up: first
0.01bars may return NaN or partial state per implementation. - Parameter sensitivity: smaller periods increase noise; larger periods increase lag.
- Sudden gaps or bad ticks can distort rolling windows — consider pre-filtering.
- Single-series indicators ignore volume unless otherwise documented.
- Validated via proptests against gold-standard vectors where available.
- No look-ahead bias; streaming and Polars batch paths are bit-identical.
Boundary Behavior
| Condition | Behavior |
|---|---|
| Warm-up | Leading bars return NaN until warmup_bars is satisfied. |
| period > len | When period exceeds series length, output is all NaN. |
| NaN inputs | NaN in input propagates to output (NaN out). |
| Invalid params | Non-positive period or missing required params raise ValueError. |
| Empty data | Empty input returns an empty result series. |
Related Indicators & See Also
Sources & References
Primary Source: https://en.wikipedia.org/wiki/Kalman_filter
Implementation: quantwave-core/src/indicators/kalman.rs (KALMAN_FILTER / KALMAN_FILTER_METADATA).
Parity: quantwave-core/tests/gold_standard/kalman_filter.json
Provenance: Standards bulk upgrade 2026-06-25 IST — see docs/DOCUMENTATION_STANDARDS.md.